top of page





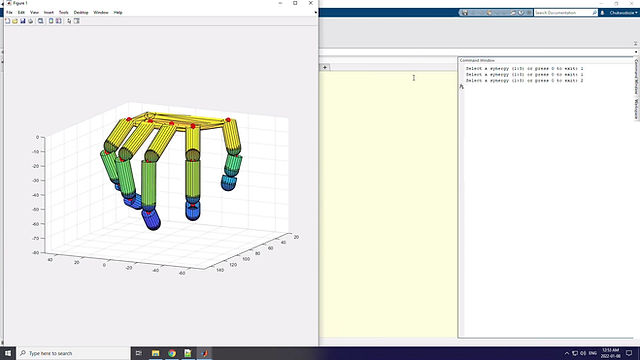
Using SynGrasp 2.3 to simulate best possible grips on various object with paradigmatic hand
Utilizing Python3, MediaPipe, OpenCV and Arduino to control a robotic hand with a real time image of a hand


Accelerating growth in Robotic Prosthetics
bottom of page